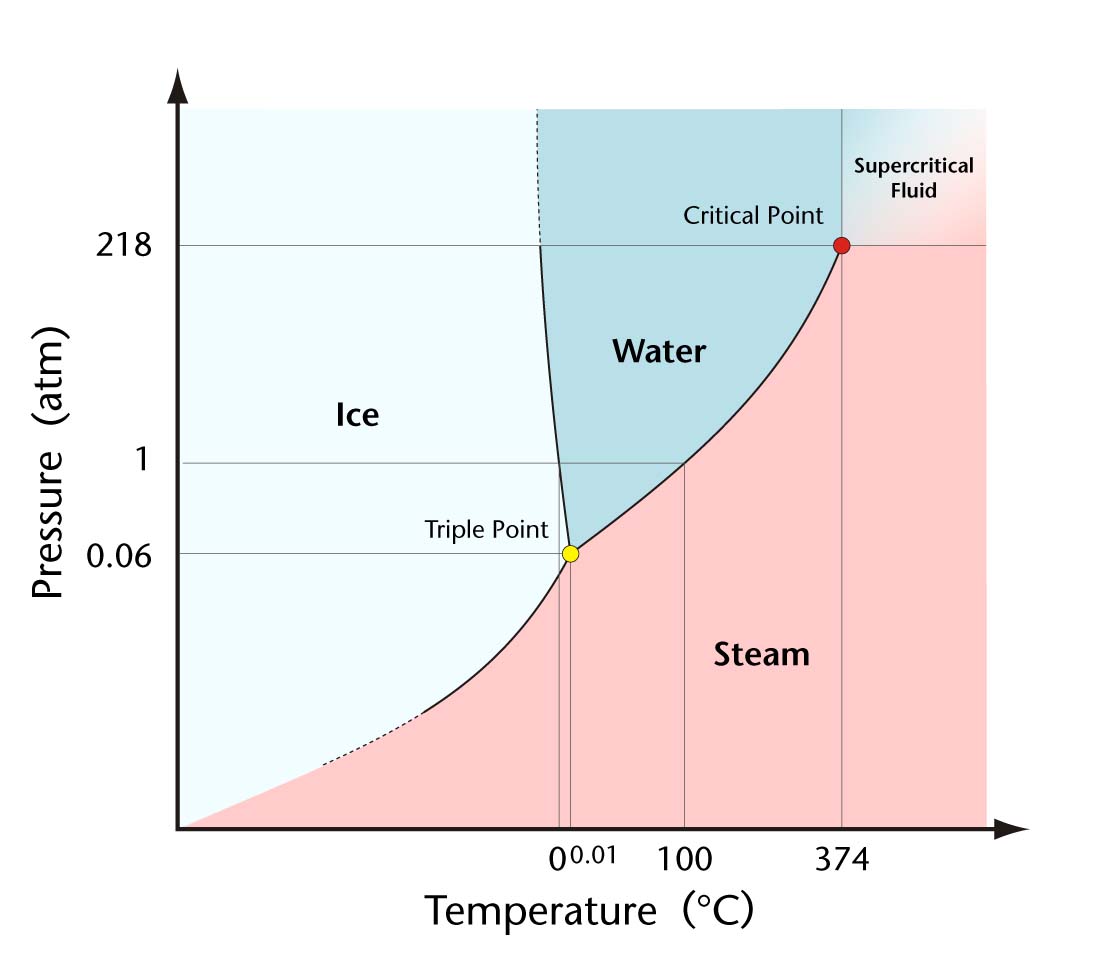
Fig. 1: Makeshift pamphlet folding rig
So what else is there to consider? Well, three free dimensions can also be referred to as three “degrees of freedom,” a fancy term that just says a variable can change as necessary. The more degrees of freedom that exist, the harder it is to pinpoint the position of an object that moves freely, like the corner of a pamphlet. What’s also cool about the three spatial dimensions is that even though by default we orient the basis of the defined dimensions to align one direction with gravity because this simplifies calculations, linear algebra tells us that the basis vectors x, y and z are easily translatable to different positions. Now let’s take my desk, oriented by default in the x-y plane, and translate it so that it now exists in the y-z plane. This is kind of similar to if I were floating with my body parallel to the desk, which would make more sense if I were in outer space since there is not as strong a default frame of reference when gravity is not apparent. What we see now is that my desk has somehow become like a wall! Amazing! This tells us that floors, walls and ceilings are not very dissimilar from each other, the common theme being that if I beamed a ball in a closed room, it would bounce off of all surfaces because its free motion in the three spatial directions has been truncated.

Fig. 2: Designation of three spatial dimensions adjusted to rig
Let’s return to the pamphlet folding rig. The rig is comprised simply of three walls: the desk and two others constructed from a box and a paper tray. Additionally, while folding gravity acts on the pamphlets to further constrict movement in the common z dimension, or up, while keeping the dimension still partially accessible so as to get the right side of the pamphlet over the left. My hands as well work to apply force to keep the pamphlet to the left against the box and away from me towards the paper tray while creasing, limiting the x and y dimensions. If we look at the two corners of the pamphlet tucked into the rig while half-folding, all three degrees of freedom have been collapsed, the pamphlets sandwiched between one surface and my hands along all three axes. Not only are these corners restrained, but the geometry of the pamphlet then guarantees that all other corners of the pamphlet should be aligned as well. So while in practice errors on my part and in my shabby rig’s construction limit the effectiveness of this folding method, in theory restricting the three degrees of spatial freedom of the pamphlet should produce a perfect fold every time without the frustration of any dancing corners.

Fig. 3: The final folded pamphlets
While some people may not appreciate such a lengthy analysis of as simple a contraption as a corner for folding pamphlets, I think really delving into why something so common-sense works from a physics standpoint demonstrates how approaching the world from an analytical perspective provides insights that can help everyday people live better lives. I hope you enjoyed this article, and if you have any feedback or questions, leave me a comment below. I love hearing from you guys. Thanks!